

 下载:
下载:

-
近年来,机器人技术发展迅速,从人形机器人、外骨骼到脑机接口等领域均取得显著突破。然而,传统机电范式高度依赖刚性材料、电机驱动与外部能源供给,其在微尺度能量利用、复杂环境适应以及长期自主性方面逐渐逼近性能极限[1-3]。能源供给方面,现有电池的能量密度仅约为生物体脂肪的2%左右,且微尺度下机电系统完成同等机械功所需的能量约为天然肌肉的3~10倍,这使得当前机器人系统难以兼具小体积和长续航能力[4]。人体适配性方面,由于金属刚性材料与软组织之间力学失配可达约9个数量级,这限制了当前机器人技术在长期植入、柔性交互和自适应形变等领域的应用[5]。随着系统功能复杂度提升,传统架构在实时反馈、能耗与高效感知方面趋于瓶颈[4]。
随着合成生物[6]与柔性电子[5]等前沿技术大力发展,“让生命体成为机器人系统的一部分”[4]已逐步成为突破机电范式边界的重要方向。生物混合机器人融合生命系统的代谢、感知与修复等能力,再结合人工组件和外部刺激调控机制,可构建具有自我驱动、环境感知、智能调控的类生命系统。近年来,生物混合机器人已获得全球关注。截至2026年1月,美国国防高级研究计划局通过“先进研究概念”计划启动HyBRIDS项目支持生物混合机器人研发[7]。欧盟则在“未来与新兴技术计划”中布局了Robocoenosis项目[8],并在“地平线计划”[9]中设置“面向生物混合机器人设计与制造的模块化框架”的主题研究,加速该方向的组件集成与工程化落地。日本在“先进探索类计划”中布局了“竹内-生物混合创新项目”推动早期生物混合机器人的概念验证与原型探索[10]。我国已有地方上的科研项目指南支持该方向,上海市科学技术委员会在“先锋者计划”中率先设置了“生物混合机器人”主题,用于资助该前沿交叉领域的技术发展[11]。
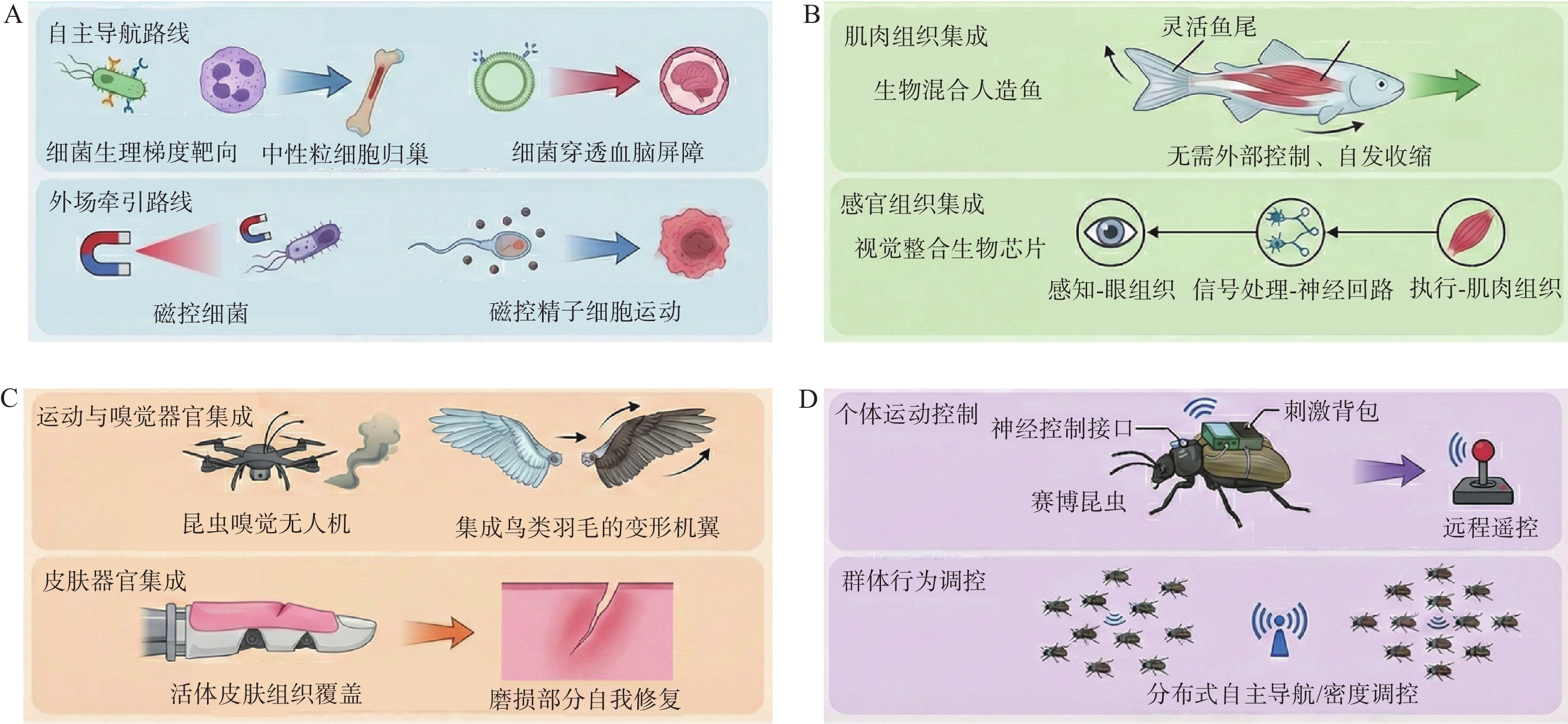
生物混合机器人的研究涉及从微观单元到宏观个体的多个层级(图1)。其中,细胞/微生物级和组织级生物混合机器人与药物递送和评价关系最为密切,因而受到药学领域的广泛关注:前者利用细胞、细菌等微观生命体直接参与体内导航和定向释药[12,13](图1A);后者则借助组织工程手段构建体外仿生模型,用于药效机制解析和体外药物筛选[14,15](图1B)。相比之下,器官级和个体级生物混合机器人更多面向生理环境监测、灾害救援等场景:器官级侧重于将动物器官或其特定功能单元与人造系统融合,以获得高灵敏、多模态的感知[12]或高效运动能力[13](图1C);个体级主要以完整活体动物为主体,通过植入微电子、光刺激或神经控制装置,使动物的部分生理功能可被外部信号调控[14-16](图1D)。然而,由于二者尺度均为厘米级,其难以在血管内迁移或跨越生理屏障实现递药,且结构复杂、标准化难度大,难以满足药物筛选对高通量操作和数据一致性的要求。加之涉及活体伦理与监管门槛,其在药物研究领域的应用潜力相对有限。因此,本文将主要围绕细胞/微生物级和组织级生物混合机器人,梳理其在药物递送和药效评价中的最新研究进展,为突破深部递送屏障、提升生物相容性以及实时监测药效等提供新思路。
图 1 生物混合机器人的关键技术进展
-
生物混合机器人通过将活细胞或微生物与功能材料相结合,可作为新型“智能载体”实现药物的体内导航递送。当前研究主要利用细菌、藻类、免疫细胞等生命体的自主运动与代谢功能来实现微尺度驱动与靶向导航。根据动力来源与控制方式不同,可将此类机器人分为自主导航和外场牵引两类。
-
自主导航主要依赖生物体固有的趋化、趋光或趋磁等特性,实现自主识别、迁移、聚集与在位作用[17]。较传统人工组件机器人,该策略的优势在于:一是可利用复杂非结构化环境中的生理梯度进行定向迁移,无需持续依赖外部能量或场控;二是由于载体本身多来自机体或具有生物相容性,因而不易被免疫系统清除,具备良好的生物相容性和隐蔽性[17-18]。例如,You团队利用骨髓来源中性粒细胞衰老后返回骨髓并发生凋亡的生物学特性,构建一种基于免疫细胞的新型药物递送系统[19]。该系统通过内吞使人工药物模块搭载上骨髓嗜中性粒细胞,利用其天然的骨髓归巢能力跨越骨髓-血液屏障,提高靶部位药物浓度,优化治疗效果。Zhou所在团队则开发了一种跨血脑屏障的药物递送平台,该系统借助血液中中性粒细胞的天然归巢行为,将负载人工模块(吡格列酮)的外膜囊泡定向输送至脑缺血区域,在抑制铁死亡和炎症反应的同时实现脑卒中精准治疗[20]。
除了利用宿主自身细胞外,某些益生菌天然具有肿瘤归巢和定植能力,也可用于递送抗癌药物。Wu等利用益生菌的肿瘤趋向性特征,将pH响应型阿霉素前药与金纳米棒共价偶联到其表面,构建了可主动靶向肿瘤缺氧区的细菌驱动微型机器人[21]。Zhang所在团队则将小微胞藻(自带鞭毛,能自主游动)作为活体发动机,构建了一类兼具靶向运动与药物负载能力的生物混合微型机器人[22]。该系统借助藻类鞭毛提供的持续推进力,可主动穿越肺部黏液屏障,并有效规避巨噬细胞吞噬(图2)。因此,其可作为吸入给药载体,用于金黄色葡萄球菌肺炎的肺部局部治疗。

图 2 藻类生物混合机器人雾化吸入递送过程[22]
-
外场牵引主要是通过磁场、光场或电场等外部物理场,精准控制机器人的定位与释放[23]。与自主导航不同,这类策略依赖外部设备产生的信号来牵引或触发机器人的运动与释药行为。其优势在于操作者可实时调整和监视机器人的位置和工作状态,从而在复杂环境中获得更高的可控性和定位精度。
典型的外场控制案例是借助磁场引导具有磁性或对磁场敏感的生物载体进行递药[24]。例如,Martel等利用趋磁细菌的磁-气双导向特性,在外加磁场和氧浓度梯度的协同作用下,引导药物克服肿瘤高内压和致密基质的阻碍,在常规给药难以覆盖的深部组织肿瘤乏氧区实现定点释放[25]。Xu等提出了“精子+微电机”混合系统,在装载抗癌药物的公牛精子外部套接一个四臂螺旋微机械,并通过旋转磁场远程操控其运动方向[26],精子凭借自身尾部摆动推进,在磁力引导下可穿过生殖道黏液等屏障抵达目标肿瘤部位;到达后,再张开机械臂释放出携带的精子及药物,实现近距离药物释放。Tu等通过细胞膜伪装、药物负载与化学组装,将自然界的磁驱细菌改造为多功能治疗平台[27]。在体外磁场控制下,该载药细菌能够主动游动清除靶区域的病原体和炎性介质,并通过磁热效应触发药物释放并介导局部免疫调节实现细菌性肺炎的治疗(图3)。
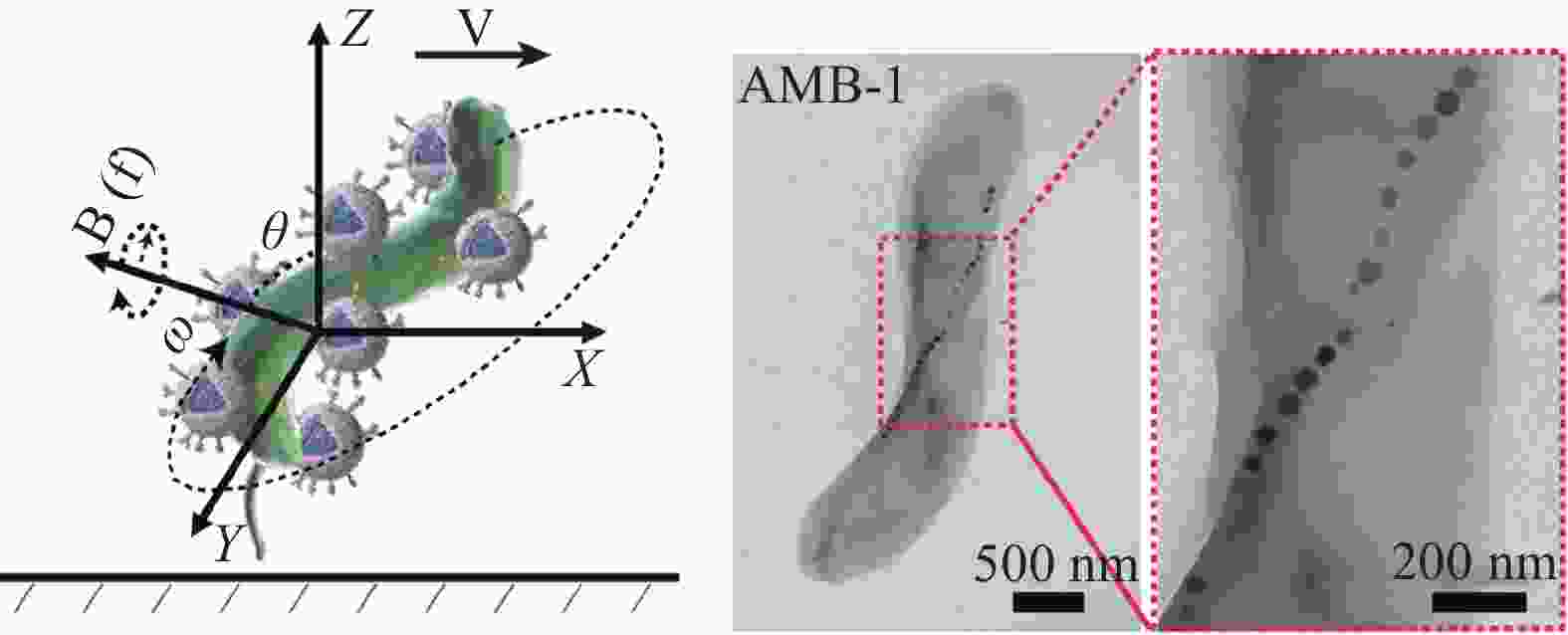
图 3 利用磁场驱动细菌定向运动的生物混合机器人[27]
-
传统药物载体(如脂质体、聚合物纳米粒等)可通过包封与表面修饰提高药物稳定性、改善体内循环行为,并实现一定程度的缓/控释与靶向富集[28-30]。然而,其在实体组织内的递送深度、靶向性与可控释放方面仍受到多重生理屏障的制约。生物混合机器人则为解决上述问题提供了新思路。
一是生物混合机器人可增强药物对深部组织的渗透并增加靶向部位的蓄积。传统脂质体等主要利用增强型渗透滞留效应被动靶向到疾病部位。但在实际应用中,由于致密的细胞外基质、升高的间质液压与不规则血管灌注等因素,常会造成药物深部穿透不足与空间分布不均[31]。而生物混合机器人则可利用活体组件的自驱动能力(如细菌鞭毛运动),提升在复杂微环境中的穿透效率[32]。结合外部物理场调控,操作者能精确引导其停留在指定区域,最大化局部药物蓄积。因此,在大型实体瘤及血脑屏障等特殊生理环境下,该特性应用潜力较大。
二是生物混合机器人可提高疗法的生物相容性。常规纳米载体的安全性总体可控,但部分无机纳米材料可能引发氧化应激、免疫反应及长期滞留体内等风险[33]。生物混合机器人源自生命体系,其天然具备良好的生物相容性。该体系采用的载体细胞(如红细胞)不仅能有效逃避免疫识别并维持循环稳定性,还可在递送任务完成后通过凋亡、吞噬或代谢途径被机体自然清除[34]。对于工程化细菌载体,可引入对抗生素敏感的自灭菌菌株,或设计基因线路实现可控清除。例如,Rottinghaus等设计的可遗传稳定的成簇规律间隔短回文重复序列(clustered regularly interspaced short palindromic repeats, CRISPR)类“自杀开关”[35],该系统可在四环素或温度等预设条件下快速启动自杀程序,提升活菌疗法的体内安全性。然而,从临床转化视角看,尽管已有自毁机制,工程菌仍存在跨越黏膜屏障发生异位转移的风险,一旦入血可能诱发菌血症或败血症等严重不良反应[36]。
-
除直接用于体内药物递送外,生物混合机器人通过整合生物与人工组件在体外构建模拟真实器官功能的微生理系统。例如,其可利用心肌或骨骼肌细胞自发产生的生物源性力来模拟器官的力学微环境,更精准地还原真实生理状态。Michas等通过双光子直写光刻技术,构建了由心肌组织自发搏动驱动的“活体心脏泵”[37]。该装置利用心肌组织自发性搏动作为动力源,通过纳米级精度腔体-流道结构与高灵敏度微流控阀门系统,将心肌收缩高效转化为稳定的流体输出,成功在体外模拟心脏泵血功能,用于心脏药物的体外筛选(图4)。类似的,Nesmith等将人支气管平滑肌细胞培养成各向异性的平滑肌组织并集成于薄膜上[38]。当胆碱能激动剂作用时,平滑肌会发生收缩并驱动薄膜弯曲,从而在体外复现了支气管收缩与舒张功能,并可用于评价支气管舒张剂、抑制剂等药物对气道张力的影响。
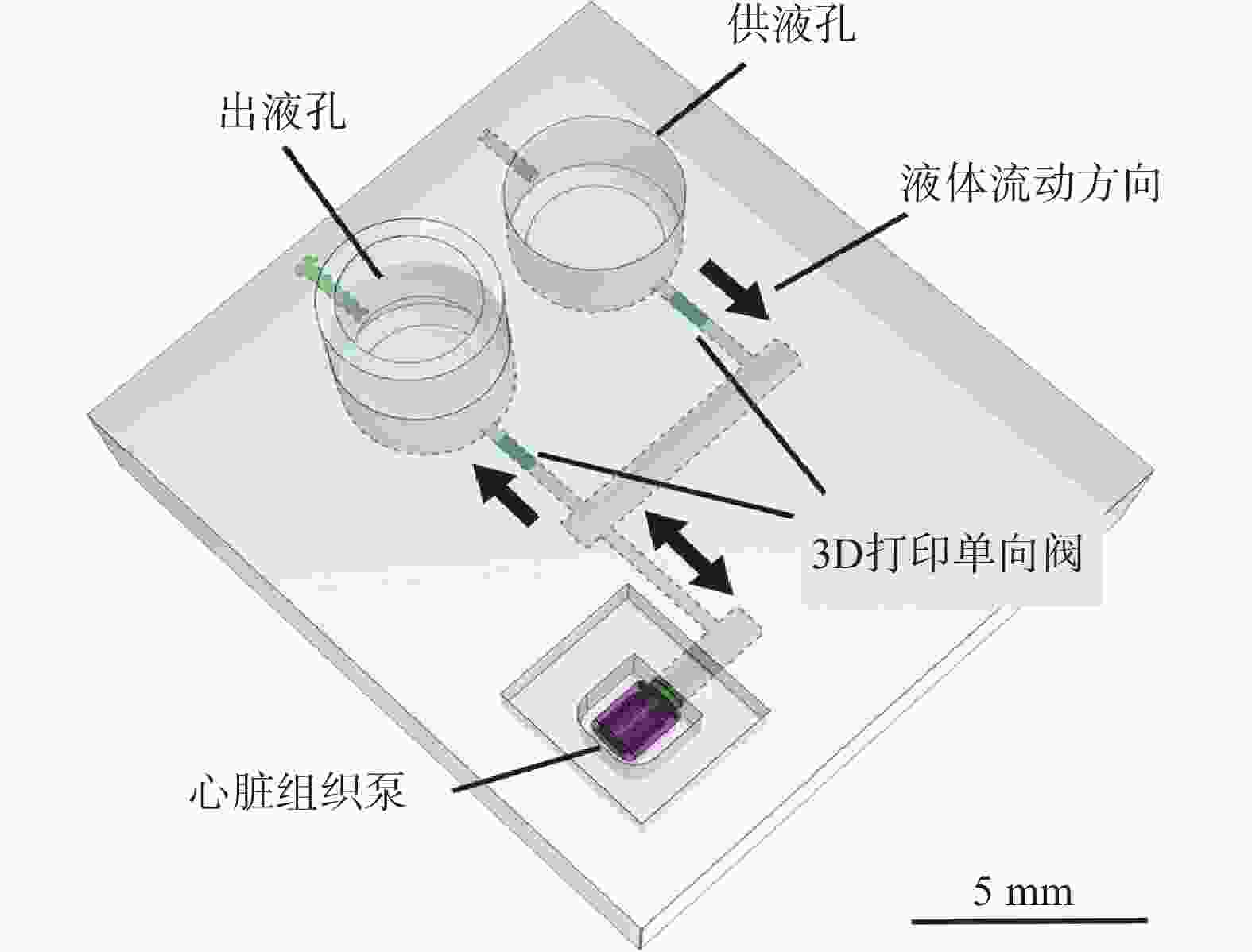
图 4 由心肌组织自发搏动驱动的生物混合机器人[37]
此外,生物混合机器人还可用于药物剂型或递送策略的优化。例如,Neiman等通过体外心脏系统筛选了mRNA脂质体的配方[39]。得益于该系统在组织结构与功能上高度贴近人体生理状态,团队可直接评估不同配方载体在三维心肌环境中的扩散与转染效率,成功筛选出高效递送配方。上述研究表明,针对特定生理屏障与功能表型构建的生物混合机器人,有望为药物剂型早期筛选提供有效工具。
-
通过集成多细胞与多组织模块,生物混合机器人能够在体外模拟复杂的器官间交互作用,从而在毒性预测中涵盖代谢转化及次级损伤等关键因素,提升评价的系统性与准确性。例如,Shin等构建了集成眼、大脑、运动神经和肌肉等组织的生物混合机器人[40]。该系统能够在体外重建“视觉感知-神经处理-肌肉执行”的完整生理过程,可用于评估神经传导通路治疗药物的系统毒性,为神经退行性疾病药物研究提供体外模型补充。Ronaldson-Bouchard等则通过循环血管网络将心脏、肝脏、骨骼和皮肤等组织微环境相互连接,构建了用于评价药物系统毒性的生物混合机器人[41]。该系统成功复现了阿霉素的体内药代动力学过程及其心脏毒性特征(miRNA表达变化),证明含内皮屏障的多器官互连模型在预测药物毒性方面优于单一器官或简单流体模型。
-
生物混合机器人在药效表征和生理环境模拟等方面相较其他模型有一定优势。一是可实时动态评价药物作用。不同于传统模型多依赖生化指标或终点检测,生物混合机器人可通过自身的宏观运动(如位移、速度、收缩频率等)直接表征药物对组织器官生理功能的影响,尤其适用于心血管与神经肌肉系统的药效评价[42]。结合柔性传感与信号采集模块,可实现药物作用过程的实时、连续与数字化监测,增加数据维度并提升评价精度。二是可模拟人体微环境,提升模型预测的准确性。传统二维细胞模型以单一细胞系、静态培养为主,难以复现氧气等营养物质的浓度梯度等因素,药物反应易偏离体内真实情况[43]。生物混合机器人可通过重建细胞间和细胞-基质相互作用、并引入剪切力、周期性拉伸等关键力学信号,使药物反应更接近人体。相比动物实验,该系统常以人源细胞与组织构建,可降低物种差异导致的偏差,提高实验的可控性,并减少动物使用。
-
生物混合机器人正在推动机器人学从仿生迈向“生命-机械融合”。在药物递送与筛选领域,其可通过集成活体生物组件,实现药物载体的主动导航及实时生理监测,提升疗效和安全性。在药物筛选中,该系统可全面揭示药物的分布特性、系统效应等,为安全性评估提供更全面的数据支撑。目前,该领域已从最初依赖单一肌肉收缩的简单系统,逐步演化为整合血管化组织与神经网络的复合系统,并正朝着具备触觉感知和高级自主决策能力的智能体系迈进,但整体仍处于可行性验证阶段[44]。
面向药物递送和药效评价等场景,仍需在三方面持续突破:第一,活细胞的寿命和稳定性有限,且多细胞共培养和多组织集成仍然缺乏工程规范。因此,当前亟需优化营养供给与芯片封装技术,在保障营养交换、免疫隔离等基础上,提升系统长期运行的稳定性。第二,材料体系及微流控结构等尚缺乏统一标准,难以支撑多组织、多尺度结构的产品规模化生产。当前亟需发展模块化制造与标准化平台以提高产品可重复性,并加速建立统一接口与信号转换标准,完善多模态信息传输机制。第三,临床转化验证与安全监管体系亟待完善。鉴于生物混合机器人的活体属性,其安全性评估面临临床与环境的双重挑战。前者需重点评估其植入患者体内后可能引发的免疫排斥、异常定植以及菌血症等安全风险,并需符合现行药品或医疗器械审评标准;后者则需要关注生物学元件可能出现的外泄扩散、在环境中持续存活等潜在生态风险。
未来随着AI控制、柔性电极、3D生物打印与生物-机械界面工程不断进步,生物混合机器人有望发展为具备感知、学习与适应能力的智能诊疗平台。在体外,生物混合机器人可聚焦于开发高度集成、互作可控的体外生物混合系统,逐步替代动物模型。在体内,其治疗手段将进一步拓展,可涵盖药物递送或微创手术等。未来更可推动其形成“体外药效预测—体内精准治疗”的闭环,开辟更安全、经济、有效的诊疗新路径。
Research advances of biohybrid robotics in medical applications
-
摘要: 生物混合机器人是将细胞、组织、器官或微生物等活体生物组件,与传感、驱动、控制及结构材料等人工合成组件深度集成的混合系统。本文聚焦细胞/微生物级与组织级生物混合机器人,综述其在体内靶向递药与体外药物评价两大场景中的应用现状。国际研究进展表明,生物混合机器人为突破深部递送屏障、提升生物相容性以及实时监测药效等提供新思路,但其临床转化仍面临可重复性、体内外营养供给、体系封装以及安全监管等关键挑战。Abstract: Biohybrid robots are hybrid systems that deeply integrate living biological components (such as cells, tissues, organs, or microorganisms) with artificial synthetic components (including sensors, actuators, control systems, and structural materials). Focusing on key advancements in cellular/microbial-level and tissue-level biohybrid robots, the applications in two major scenarios: targeted drug delivery in vivo and drug evaluation in vitro were reviewed. International research progress demonstrated that biohybrid robots offered novel solutions for overcoming deep tissue delivery barriers, enhancing biocompatibility, and enabling real-time monitoring. However, their clinical translation still faced critical challenges, including reproducibility, in vivo/in vitro nutrient supply, encapsulation technologies, and safety regulatory frameworks.
-
Key words:
- biohybrid robots /
- precision medicine /
- drug delivery /
- drug evaluation /
- bio–mechanical interface
-
[1] AUBIN C A, GORISSEN B, MILANA E, et al. Towards enduring autonomous robots via embodied energy[J]. Nature, 2022, 602(7897): 393-402. doi: 10.1038/s41586-021-04138-2 [2] RUS D, TOLLEY M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521(7553): 467-475. doi: 10.1038/nature14543 [3] YANG G Z, BELLINGHAM J, DUPONT P E, et al. The grand challenges of science robotics[J]. Sci Robot, 2018, 3(14): eaar7650. doi: 10.1126/scirobotics.aar7650 [4] BURDEN S A, LIBBY T, JAYARAM K, et al. Why animals can outrun robots[J]. Sci Robot, 2024, 9(89): eadi9754. doi: 10.1126/scirobotics.adi9754 [5] BOUFIDIS D, GARG R, ANGELOPOULOS E, et al. Bio-inspired electronics: Soft, biohybrid, and “living” neural interfaces[J]. Nat Commun, 2025, 16: 1861. doi: 10.1038/s41467-025-57016-0 [6] TANG T C, AN B L, HUANG Y Y, et al. Materials design by synthetic biology[J]. Nat Rev Mater, 2021, 6(4): 332-350. [7] Defense Advanced Research Projects Agency. HyBRIDS: Hybridizing Biology and Robotics through Integration for Deployable Systems[EB/OL]. (2025-01-03)[2026-01-16]. https://www.darpa.mil/research/programs/hybrids. [8] European Commission. ROBOts in cooperation with a bioCOENOSIS(Robocoenosis)- Reporting[EB/OL]. (2025-06-13)[2026-01-16]. https://cordis.europa.eu/project/id/899520/reporting. [9] European Commission. A modular framework for designingand producing biohybrid machines (BioMeld)- results[EB/OL]. (2025-10-20)[2026-01-16]. https://cordis.europa.eu/project/id/101070328/results. [10] Japan Science and Technology Agency. Takeuchi Biohybrid Innovation Project (ERATO)[EB/OL]. (2012-04-02)[2026-01-16]. https://www.jst.go.jp/erato/takeuchi/index_en.html. [11] 上海市科学技术委员会. 上海市科学技术委员会关于发布2025年度关键技术研发计划“先锋者计划”(生物混合机器人主题)项目申报指南的通知[EB/OL]. (2025-04-21)[2026-01-16]. https://stcsm.sh.gov.cn/zwgk/kyjhxm/xmsb/20250421/393d1e6b06674fa4bf3bdef731213e2c.html. [12] LUO Z Y, LU Y C, SHI Y Y, et al. Neutrophil hitchhiking for drug delivery to the bone marrow[J]. Nat Nanotechnol, 2023, 18(6): 647-656. doi: 10.1038/s41565-023-01374-7 [13] ZHANG L S, CHEN Z, RAN H, et al. Biomimetic magnetobacterial microrobots for active pneumonia therapy[J]. Nat Commun, 2025, 16(1): 7856. doi: 10.1038/s41467-025-63231-6 [14] MICHAS C, KARAKAN M Ç, NAUTIYAL P, et al. Engineering a living cardiac pump on a chip using high-precision fabrication[J]. Sci Adv, 2022, 8(16): eabm3791. doi: 10.1126/sciadv.abm3791 [15] SHIN M, LIM J, KIM S, et al. Human nervous system-based biohybrid robot-on-A-chip with sensing function for toxicity screening[J]. Adv Sci, 2025, 12(37): e01452. doi: 10.1002/advs.202501452 [16] ANDERSON M J, SULLIVAN J G, HORIUCHI T K, et al. A bio-hybrid odor-guided autonomous palm-sized air vehicle[J]. Bioinspir Biomim, 2020, 16(2): 33002883. [17] CHANG E, MATLOFF L Y, STOWERS A K, et al. Soft biohybrid morphing wings with feathers underactuated by wrist and finger motion[J]. Sci Robot, 2020, 5(38): eaay1246. doi: 10.1126/scirobotics.aay1246 [18] LIN Q F, VUONG N, SONG K W, et al. Cyborg insect factory: automatic assembly for insect-computer hybrid robot via vision-guided robotic arm manipulation of custom bipolar electrodes[J]. Nat Commun, 2025, 16(1): 6073. doi: 10.1038/s41467-025-60779-1 [19] LI R, LIN Q F, TRAN-NGOC P T, et al. Smart insect-computer hybrid robots empowered with enhanced obstacle avoidance capabilities using onboard monocular camera[J]. npj Robot, 2024, 2: 2. doi: 10.1038/s44182-024-00010-3 [20] BAI Y, TRAN NGOC P T, NGUYEN H D, et al. Swarm navigation of cyborg-insects in unknown obstructed soft terrain[J]. Nat Commun, 2025, 16(1): 221. doi: 10.1038/s41467-024-55197-8 [21] XU W X, QIN H F, TIAN H, et al. Biohybrid micro/nanomotors for biomedical applications[J]. Appl Mater Today, 2022, 27: 101482. doi: 10.1016/j.apmt.2022.101482 [22] UDOFA E, ZHAO Z M. In situ cellular hitchhiking of nanoparticles for drug delivery[J]. Adv Drug Deliv Rev, 2024, 204: 115143. doi: 10.1016/j.addr.2023.115143 [23] PAN J M, WANG Z H, HUANG X H, et al. Bacteria-derived outer-membrane vesicles hitchhike neutrophils to enhance ischemic stroke therapy[J]. Adv Mater, 2023, 35(38): e2301779. doi: 10.1002/adma.202301779 [24] WU D J, ZHAO Z J, LIU H, et al. Escherichia coli Nissle 1917-driven microrobots for effective tumor targeted drug delivery and tumor regression[J]. Acta Biomater, 2023, 169: 477-488. doi: 10.1016/j.actbio.2023.07.051 [25] LI Z X, GUO Z Y, ZHANG F Y, et al. Inhalable biohybrid microrobots: a non-invasive approach for lung treatment[J]. Nat Commun, 2025, 16(1): 666. doi: 10.1038/s41467-025-56032-4 [26] ZHOU H J, MAYORGA-MARTINEZ C C, PANÉ S, et al. Magnetically driven micro and nanorobots[J]. Chem Rev, 2021, 121(8): 4999-5041. doi: 10.1021/acs.chemrev.0c01234 [27] 刘召明, 林敏, 杨雪, 等. 趋磁细菌及磁小体在肿瘤治疗中的应用[J]. 生物工程学报, 2021, 37(9): 3190-3200. [28] FELFOUL O, MOHAMMADI M, TAHERKHANI S, et al. Magneto-aerotactic bacteria deliver drug-containing nanoliposomes to tumour hypoxic regions[J]. Nat Nanotechnol, 2016, 11(11): 941-947. doi: 10.1038/nnano.2016.137 [29] XU H F, MEDINA-SÁNCHEZ M, MAGDANZ V, et al. Sperm-hybrid micromotor for targeted drug delivery[J]. ACS Nano, 2018, 12(1): 327-337. doi: 10.1021/acsnano.7b06398 [30] LIU P, CHEN G L, ZHANG J C. A review of liposomes as a drug delivery system: current status of approved products, regulatory environments, and future perspectives[J]. Molecules, 2022, 27(4): 1372. doi: 10.3390/molecules27041372 [31] SOBOL Ż, CHICZEWSKI R, WĄTRÓBSKA-ŚWIETLIKOWSKA D. Advances in liposomal drug delivery: multidirectional perspectives on overcoming biological barriers[J]. Pharmaceutics, 2025, 17(7): 885. doi: 10.3390/pharmaceutics17070885 [32] 陈炳辰, 王思真, 郭贝贝, 等. 紫杉醇棕榈酸酯的合成及其脂质体的制备与处方研究[J]. 药学实践与服务, 2024, 42(9): 379-384, 410. doi: 10.12206/j.issn.2097-2024.202404062 [33] JIANG X H, XU S, MIAO Y Q, et al. Curvature-mediated rapid extravasation and penetration of nanoparticles against interstitial fluid pressure for improved drug delivery[J]. Proc Natl Acad Sci USA, 2024, 121(22): e2319880121. doi: 10.1073/pnas.2319880121 [34] DEY S, SANKARAN S. Engineered bacterial therapeutics with material solutions[J]. Trends Biotechnol, 2024, 42(12): 1663-1676. doi: 10.1016/j.tibtech.2024.06.011 [35] 周娇, 郑建雨, 王思真, 等. mRNA肿瘤疫苗非病毒递送系统研究进展[J]. 药学实践与服务, 2025, 43(3): 109-116. doi: 10.12206/j.issn.2097-2024.202410034. [36] LIU H, SU Y Y, JIANG X C, et al. Cell membrane-coated nanoparticles: a novel multifunctional biomimetic drug delivery system[J]. Drug Deliv Transl Res, 2023, 13(3): 716-737. doi: 10.1007/s13346-022-01252-0 [37] ROTTINGHAUS A G, FERREIRO A, FISHBEIN S R S, et al. Genetically stable CRISPR-based kill switches for engineered microbes[J]. Nat Commun, 2022, 13(1): 672. doi: 10.1038/s41467-022-28163-5 [38] CHARBONNEAU M R, ISABELLA V M, LI N, et al. Developing a new class of engineered live bacterial therapeutics to treat human diseases[J]. Nat Commun, 2020, 11(1): 1738. doi: 10.1038/s41467-020-15508-1 [39] NESMITH A P, AGARWAL A, MCCAIN M L, et al. Human airway musculature on a chip: an in vitro model of allergic asthmatic bronchoconstriction and bronchodilation[J]. Lab Chip, 2014, 14(20): 3925-3936. doi: 10.1039/C4LC00688G [40] NEIMAN G, COSTA M W, HAN H S, et al. A microphysiological system for screening lipid nanoparticle-mRNA complexes predicts in vivo heart transfection efficacy[J]. Nat Biomed Eng, 2025: 41184608. [41] RONALDSON-BOUCHARD K, TELES D, YEAGER K, et al. A multi-organ chip with matured tissue niches linked by vascular flow[J]. Nat Biomed Eng, 2022, 6(4): 351-371. doi: 10.1038/s41551-022-00882-6 [42] DOU W K, MALHI M, ZHAO Q L, et al. Microengineered platforms for characterizing the contractile function of in vitro cardiac models[J]. Microsyst Nanoeng, 2022, 8: 26. doi: 10.1038/s41378-021-00344-0 [43] DUVAL K, GROVER H, HAN L H, et al. Modeling physiological events in 2D vs. 3D cell culture[J]. Physiology, 2017, 32(4): 266-277. doi: 10.1152/physiol.00036.2016 [44] LIN Z N, JIANG T, LUO Z R. Focus on the evolution roadmap of biohybrid muscle robots[J]. Matter, 2024, 7(12): 4126-4129. doi: 10.1016/j.matt.2024.10.010 -

 点击查看大图
点击查看大图
图(4)
计量
- 文章访问数: 417
- HTML全文浏览量: 191
- PDF下载量: 4
- 被引次数: 0
